 |
Adjacency Lists:
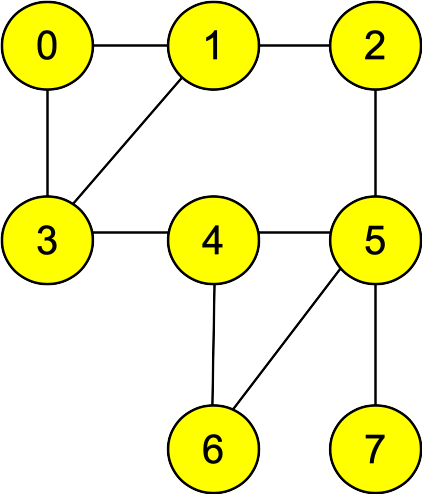
0: 1, 3 1: 0, 2, 3 2: 1, 5 3: 0, 1, 4 4: 3, 5, 6 5: 4, 6, 7 6: 4, 5 7: 5 |
|
Adjacency Lists:
0: 1, 3 1: 0, 2, 3 2: 1, 5 3: 0, 1, 4 4: 3, 5, 6 5: 4, 6, 7 6: 4, 5 7: 5 |
A recursive visiting of all nodes using DFS starting with node zero will look as follows:
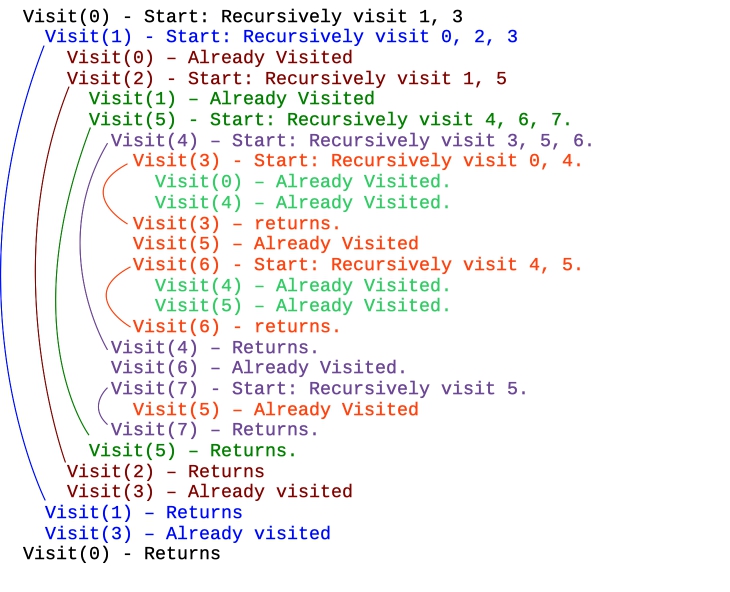 |
Were we to print out the nodes, they would be printed out in the order in which they are visited:
0, 1, 2, 5, 4, 3, 6, 7
Visited?
Node Print 01234567 Action Stack (Push-back and pop-back)
-------- Push 0 0
0 0 x------- Push 3, 1 3, 1
1 1 xx------ Push 3, 2 3, 3, 2
2 2 xxx----- Push 5 3, 3, 5
5 5 xxx--x-- Push 7, 6, 4 3, 3, 7, 6, 4
4 4 xxx-xx-- Push 6, 3 3, 3, 7, 6, 6, 3
3 3 xxxxxx-- No pushing 3, 3, 7, 6, 6
6 6 xxxxxxx- No pushing 3, 3, 7, 6
6 xxxxxxx- Visited 3, 3, 7
7 7 xxxxxxxx No pushing 3, 3
3 xxxxxxxx Visited 3
3 xxxxxxxx Visited
Done
|
As you see, the order of the nodes is the same as in the recursive case.
Now, breadth-first search works in the same manner, only we use a queue instead of a stack, and we push the children onto the queue in their proper order. Additionally, instead of a "visited" field, we are going to keep two pieces of data with each node:
Here's how breadth-first search works on the graph above.
Distances Back Links Queue
Node Print Action 0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7 (Push-back and pop-front)
Push 0 0 - - - - - - - - - - - - - - - 0
0 0 Push 1, 3 0 1 - 1 - - - - - 0 - 0 - - - - 1, 3
1 1 Push 2 0 1 2 1 - - - - - 0 1 0 - - - - 3, 2
3 3 Push 4 0 1 2 1 2 - - - - 0 1 0 3 - - - 2, 4
2 2 Push 5 0 1 2 1 2 3 - - - 0 1 0 3 2 - - 4, 5
4 4 Push 6 0 1 2 1 2 3 3 - - 0 1 0 3 2 4 - 5, 6
5 5 Push 7 0 1 2 1 2 3 3 4 - 0 1 0 3 2 4 5 6, 7
6 6 Nothing 0 1 2 1 2 3 3 4 - 0 1 0 3 2 4 5 7
7 7 Nothing 0 1 2 1 2 3 3 4 - 0 1 0 3 2 4 5
|
The order of the nodes is now 0, 1, 3, 2, 4, 5, 6, 7.
BFS still visits all nodes and edges, but it does so in order of distance from the starting node. Think about it.
Let's rehash the algorithm for BFS:
[* Revisiting Here *]: You actually have a choice of whether to remove a node from the multimap
or not. It is often easier to code up Dijkstra's algorithm to leave nodes on the multimap
rather than remove them. In that case, when a node reaches the front of the multimap for
you to process, you need to check its distance versus its key in the multimap.
If they
differ, you simply ignore the node, because you have processed it already.
The tradeoff
is memory and potentially performance vs coding complexity. When you code, it is much
easier to leave the node on the multimap. However, if you end up replacing a lot of nodes
on the multimap, it can make performance and memory consumption suffer. Ideally, it is
better to remove the node before you re-insert it. To do that properly, you need to store
an iterator to the node's place in the multiple, in the node's class definition. Think
about that, especially if you decide to remove the node in your own implementation. BTW,
I do advocate that you try removing the node in your lab. Not only is the code better,
but it forces you to think about data structure design..
As an example, suppose we enrich the graph above with edge weights:
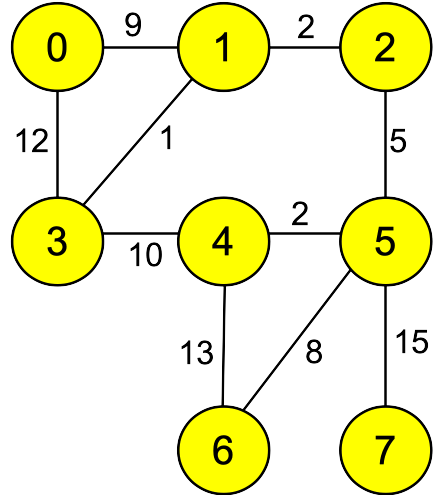 |
The following shows how Dijkstra's algorithm runs on the graph:
Distances Back Links Multimap
Node Action 0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7 (key=distance,val=node)
Add[0,0] 0 - - - - - - - -1 - - - - - - - [0,0]
0 Add[9,1] 0 9 - - - - - - -1 0 - - - - - - [9,1]
Add[12,3] 0 9 - 12 - - - - -1 0 - 0 - - - - [9,1] [12,3]
1 Add[11,2] 0 9 11 12 - - - - -1 0 1 0 - - - - [11,2][12,3]
Del[12,3],Add[10,3] 0 9 11 10 - - - - -1 0 1 1 - - - - [10,3][11,2]
3 Add[20,4] 0 9 11 10 20 - - - -1 0 1 1 3 - - - [11,2][20,4]
2 Add[16,5] 0 9 11 10 20 16 - - -1 0 1 1 3 2 - - [16,5][20,4]
5 Del[20,4],Add[18,4] 0 9 11 10 18 16 - - -1 0 1 1 5 2 - - [18,4]
Add[24,6] 0 9 11 10 18 16 25 - -1 0 1 1 5 2 5 - [18,4][24,6]
Add[31,7] 0 9 11 10 18 16 25 31 -1 0 1 1 5 2 5 5 [18,4][24,6][31,7]
4 Do nothing 0 9 11 10 18 16 25 31 -1 0 1 1 5 2 5 5 [24,6][31,7]
6 Do nothing 0 9 11 10 18 16 25 31 -1 0 1 1 5 2 5 5 [31,7]
7 Do nothing 0 9 11 10 18 16 25 31 -1 0 1 1 5 2 5 5
|
As with the BFS run above, you can use the back-links to find the shortest paths. For example, the shortest path from node 0 to node 6 has a path length of 24, and contains the following nodes in reverse order: 6-5-2-1-0. The following shows the path in forward order with the weights below the edges:
0 ----- 1 ----- 2 ----- 5 ----- 6
9 2 5 8
|